viernes, 11 de octubre de 2013



AUTOMATISMOS INDUSTRIALES
En la siguiente página podeis encontrar algunos contenidos sobre automatismo.
http://recursostic.educacion.es/secundaria/edad/4esotecnologia/quincena11/4quincena11_contenidos_1a.htm
http://recursostic.educacion.es/secundaria/edad/4esotecnologia/quincena11/4quincena11_contenidos_1a.htm
http://recursostic.educacion.es/secundaria/edad/4esotecnologia/quincena11/4quincena11_contenidos_1a.htm
| 1. Introducción | | ||
Automatización
La búsqueda de una mayor comodidad para los usuarios y de la eliminación de la posibilidad del fallo humano en la actividad tecnológica y los procesos industriales se puede dividir en tres fases:
Por ejemplo, elevar una carga pesada mediante un ascensor supone que una sola persona, el ascensorista, puede realizar el trabajo de muchos y además sin cansarse. Pasamos de necesitar varias personas a sólo una para levantar una carga, y además esa persona realiza un trabajo más cómodo que los antiguos porteadores.
|   | ||
|
Por ejemplo, sustituir el ascensor anterior por una escalera mecánica; ya no necesitamos a alguien que suba y baje con la escalera, sino solamente que la ponga en marcha, la apague y la repare en caso de avería. Pasamos de necesitar múltiples ascensoristas a sólo un técnico que puede controlar todas las escaleras del edificio.
| |||
http://recursostic.educacion.es/secundaria/edad/4esotecnologia/quincena11/4quincena11_contenidos_1a.htm
2. Sistemas de Control
Sistemas de Control
| Sistemas de Control 2. Sistemas de Control | ||
Recordemos que los automatismos y los robots son capaces de iniciar y detener procesos sin la intervención manual del usuario. Para ello necesitarán recibir información del exterior, procesarla y emitir una respuesta; en un automatismo dicha respuesta será siempre la misma pero en un robot podemos tener diferentes comportamientos según las circunstancias. A esto se le llama un sistema de control.
A la información que recibe el sistema del exterior se le denomina de forma genérica entrada o input. A las condiciones que existen en el exterior después de la actuación (o no actuación) del robot se les denomina de forma genérica salida o output.
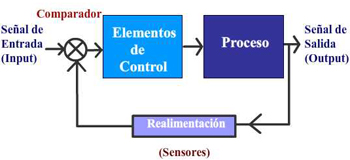
Existen dos tipos de sistemas de control de un robot: sistemas de control de lazo abierto y sistemas de control de lazo cerrado.
| 
Pincha en la imagen para ver un ejemplo de sistema de lazo abierto
| |
Sistemas de Lazo Abierto
Este sería el esquema que los define:

La mayor parte de sistemas de lazo abierto serán automatismos a los que no podremos llamar en sentido estricto robots porque, al no tener en cuenta la salida, su capacidad de toma de decisiones “inteligentes” es muy limitada.
Por ejemplo, un sistema de riego en lazo abierto tiene un temporizador que lo pone en marcha todos los días a una determinada hora; riega las plantas durante un cierto tiempo pasado el cual se interrumpe, con independencia de que las plantas hayan recibido la cantidad de agua adecuada, una cantidad excesiva o una cantidad insuficiente. Se trata de un automatismo, pero no de un auténtico robot.
| ||
AUTOMATISMOS ELÉCTRICOS
AUTOMATISMOS
TEMA 1 : INTRODUCCIÓN A LOS AUTOMATISMOS
1 INTRODUCCIÓN
1.1 Definición de automatización
La Real Academia de Ciencias Exactas Físicas y Naturales define la Automática como
el estudio de los métodos y procedimientos cuya finalidad es la sustitución del operador
humano por un operador artificial en la generación de una tarea física o mental
previamente programada.
Partiendo de esta definición y ciñéndonos al ámbito industrial, puede definirse la
Automatización como " El estudio y aplicación de la Automática al control de los
procesos industriales "
1.2 Introducción
2 EL PROCESO TÉCNICO
2.1 Procesos continuos
2.2 Procesos discretos
2.3 Procesos discontinuos o por lotes
3 FORMAS DE REALIZAR EL CONTROL SOBRE UN PROCESO
3.1 Control en lazo abierto ( bucle abierto )
3.2 Control en lazo cerrado ( bucle cerrado )
4 OPCIONES TECNOLÓGICAS
4.1 Lógica cableada

4.2 Lógica programada
4.3 Organigramas para desarrollar el control de un proceso
4.4 Fases de estudio en la elaboración de un automatismo
5 ANÁLISIS DE LOS AUTOMATISMOS
5.1 Lógica combinacional
5.2 Lógica secuencial
TEMA 1 : INTRODUCCIÓN A LOS AUTOMATISMOS
1 INTRODUCCIÓN
1.1 Definición de automatización
La Real Academia de Ciencias Exactas Físicas y Naturales define la Automática como
el estudio de los métodos y procedimientos cuya finalidad es la sustitución del operador
humano por un operador artificial en la generación de una tarea física o mental
previamente programada.
Partiendo de esta definición y ciñéndonos al ámbito industrial, puede definirse la
Automatización como " El estudio y aplicación de la Automática al control de los
procesos industriales "
1.2 Introducción
2 EL PROCESO TÉCNICO
2.1 Procesos continuos
2.2 Procesos discretos
2.3 Procesos discontinuos o por lotes
3 FORMAS DE REALIZAR EL CONTROL SOBRE UN PROCESO
3.1 Control en lazo abierto ( bucle abierto )
3.2 Control en lazo cerrado ( bucle cerrado )
4 OPCIONES TECNOLÓGICAS
4.1 Lógica cableada
4.2 Lógica programada
4.3 Organigramas para desarrollar el control de un proceso
4.4 Fases de estudio en la elaboración de un automatismo
5 ANÁLISIS DE LOS AUTOMATISMOS
5.1 Lógica combinacional
5.2 Lógica secuencial

Suscribirse a:
Entradas (Atom)